

Choosing an Intel® RealSense™ Depth Camera
There is a newer version available here.
By Brian Pruitt, Intel® RealSense™ Peripheral Segment Director
Can’t decide between the Intel® RealSense™ D415 depth camera or the Intel® RealSense™ D435 depth camera? Choosing the right depth camera for your vision project is critical, so let’s look at some of the key similarities and differences between the two models.
What’s the same? Physically, the two depth cameras are about the same size (within millimeters). Both use the same vision processor to provide RGB-D data over USB 3, and they have the same maximum depth resolution of 1280 x 720. See the entire comparison chart at the end of the post for specific measurements.
Two Main Differences
There are two main differences between the two models—field of view (FOV) and shutter type.
Field of View
The Intel RealSense D415 depth camera has approximately a 70-degree field of view (FOV). The Intel RealSense D435 depth camera has a wider FOV at approximately 90 degrees.
Shutter Type
Second, the Intel RealSense D415 depth camera has a rolling shutter while the Intel RealSense D435 depth camera has a global shutter.
The wider FOV of the Intel RealSense D435 depth camera makes it better for use cases like robotics and drones trying to navigate. The larger FOV results in more time to react to obstacles, plus the global shutter provides better performance if you’re capturing high-speed motion by preventing blurring of the depth image or shooting in low-light situations.
Intel RealSense Module Differences
Another difference between the two depth cameras is the Intel RealSense D415 depth camera is based on the Intel RealSense D415 module. This means the imagers, emitters, and RGB are on one compute board, or stiffener, making calibration much easier.
The Intel RealSense D435 camera is based on the Intel RealSense D430 module with an attached, but separate, RGB camera. The depth algorithm is based on precise placements of sensors, so not having them fixed on the same stiffener may make calibration between depth and RGB problematic. However, users of previous-generation cameras said they really wanted the flexibility of choosing their own RGB cameras.
Imager Differences and Accuracy
Another difference is the Intel RealSense D415 depth camera uses two-megapixel imagers, while the Intel RealSense D435 depth camera’s imagers are one megapixel each.
What does this mean in terms of the camera’s performance? Because the FOV is larger for the Intel RealSense D435 depth camera, you’ll notice less granularity when looking at a specific portion of the image. Stereoscopic cameras take two images from the two sensors on the camera, which have slightly different points of view, and compare them. The shift between the same points in both images can be used to determine depth.
These pictures show a magnified and exaggerated view of what each camera’s sensors see.
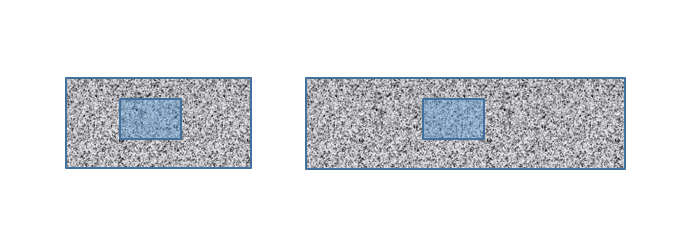
Looking at the same size area on the pictures, notice the Intel RealSense D415 has a higher pixel density, which means it’s more accurate for any given area than the Intel RealSense D435 at the same points. While this may not matter in some cases, such as object avoidance or people detection, when accuracy is paramount (3D scanning), the Intel RealSense D415 will provide a better, more accurate scan. In short, the Intel RealSense D415 is more than 2x more accurate than the D435.
Min Z Differences
Next, let’s compare “min Z” or the distance from your depth camera to the object being captured. The Intel RealSense D435 depth camera has more depth noise (>2x) at any given range compared to the Intel RealSense D415 depth camera, and it does have a smaller minimum operation distance (~0.5x) at the same resolution. This means you can get closer to the camera. For example, at 848 x 480 resolution, the Intel RealSense D415 depth camera has a min Z of about 29 centimeters, whereas the Intel RealSense D435 depth camera’s min Z is 17 centimeters.
Closing Thoughts
The Intel RealSense D415 depth camera provides the best performance across a variety of use cases. The Intel RealSense D435 depth camera is best for use cases that require as wide a FOV as possible. Check out this comparison chart, then go to https://www.intelrealsense.com/stereo-depth/ for more information.
Subscribe here to get blog and news updates.
You may also be interested in
“Intel RealSense acts as the eyes of the system, feeding real-world data to the AI brain that powers the MR
In a three-dimensional world, we still spend much of our time creating and consuming two-dimensional content. Most of the screens