

Mapping the Real World for Robots and Autonomous Devices
Moving around the real world.
Robots and autonomous products have to operate in the physical three dimensional world. It seems obvious, but many forget that in order to do so they must ‘see and understand’ in 3D to reliably, accurately and quickly calculate their position and what’s around them. Giving robots the ability to map their world and understand where they are within it is a complex business and relies on Simultaneous Localization and Mapping (SLAM) software and high-quality sensors.
Mimicking most living creatures, SLAMcore fuses data from an Intel RealSense Stereo depth camera and an inertial sensor to sense ‘motion’ ‘like the human inner ear’. SLAMcore’s software is designed to work out-of-the-box with both the Intel RealSense depth cameras D435i and D455. Rich video data and depth information from the infrared stereo cameras are combined with the integrated inertial measurement unit (IMU) data to create detailed maps and accurately locate and track the sensor in real time on cost-effective compute. A fast demonstration is possible within minutes, a prototype SLAM system within an hour and the SLAMcore software can be further tuned to fit a wide range of commercial robots/products operating in complex environments including offices, warehouses, streets and outdoors.
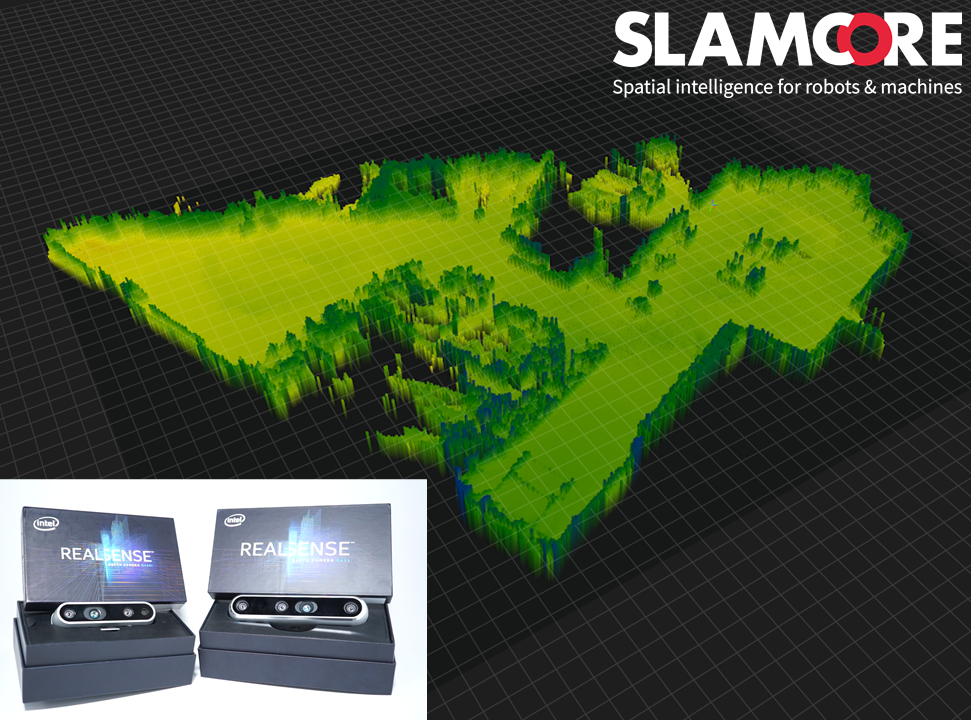
SLAMCore works with Intel RealSense stereo depth cameras to build environment maps for robots.
Why Intel RealSense?
A few features of Intel RealSense depth cameras allow for fast setup and operation with SLAMcore; precision time-stamping of data between cameras and the IMU allows SLAMcore to accurately calculate distances in real-time. From there, the software identifies and uses landmarks that enable a robot/device to track its location in the real world in real-time without the need for external sensors or markers. The wide field of view and high resolution provide numerous landmarks which means that robots can successfully locate themselves in almost any environment, and the high quality depth-maps calculated on the depth cameras provide the information for dense reconstruction of the world. The efficiency of the SLAMcore software combined with the rich data feed from the D435i or D455 allows the system to run in real-time on low cost compute devices (x86, ARM etc).
Many early robotic products used LIDAR sensors for collision avoidance and basic mapping. VisualSLAM systems have proven more accurate and robust in situations ranging from huge warehouses to small offices and from outdoor operation where landmarks may be a long way away, to busy environments with lots of dynamic objects (even people) which need to be excluded from map and location calculations. Crucially, the combination of SLAMcore software and Intel RealSense stereo depth cameras has proven to be highly effective even in highly variable light conditions, since the depth cameras can operate in a wide variety of lighting conditions including bright sunlight and darkness.

Delivery Robots need to know where they are going – SLAM software helps them do that.
Additional data for more functionality
Sensors that provide depth and color create much richer data for robots to use; they also mean that humans can also make sense of the scenes captured by robots, useful for ‘human in the loop’ operations and interactions. SLAMcore processes this additional data in a computationally efficient way so that robots can successfully estimate location in complex environments in real time on low-cost compute. As autonomous robots are deployed in an ever-wider range of locations – from disinfecting hospital wards, cleaning streets, delivering pallets in warehouses, farming crops to directing visitors in shopping malls, the ability to quickly process rich real-world data to establish precise location is critical.
The tight integration of Intel Real Sense Depth Cameras with SLAMcore software not only provides a robust and cost-effective solution for VisualSLAM but for a range of other robot functions requiring visual inputs. Using the ROS framework the output from the Intel Depth Cameras and SLAMcore’s software can be shared with other robot/device functions, including navigation and face and obstacle detection.
The market for robots is exploding, but full autonomy demands effective visual SLAM solutions that can work in the dynamic real-world and not just the lab. Designing and developing these devices is hard, time-consuming and expensive, often requiring extensive custom calibration and placement of sensors. SLAMcore and Intel RealSense working together allows robot designers to rely on visual SLAM that has been optimized to work with the leading depth cameras on the market – right out of the box.
Developers can request access to the SLAMcore software by applying through the SLAMcore website and can download and have prototypes working with the Intel RealSense Depth cameras D435i/D455 and x86 or ARM processors within minutes.
Subscribe here to get blog and news updates.
You may also be interested in
“Intel RealSense acts as the eyes of the system, feeding real-world data to the AI brain that powers the MR
In a three-dimensional world, we still spend much of our time creating and consuming two-dimensional content. Most of the screens